无(wú)人机航测(cè)-倾斜(xié)解(jiě)决摄影(yǐng)方案
1- 六旋翼大负载无人机一套、飞(fēi)行(háng)技能培(péi)训
2- 五镜头倾斜相机一套(tào)、安装集成调试(shì)
3- Smart3D一套
(1) Smart3D空三(sān)加密和三维建模(mó)设置方法
(2) 工程(chéng)操作讲解(工程创建,JOB路(lù)径配(pèi)置)
(3) 像控点刺点(diǎn)方法
(4) Samrt3D加像控(kòng)点和不加像控(kòng)点(diǎn)的处理方法
(5) 成果提交数据格式处理(成果类(lèi)型(xíng)介绍,通用(yòng)OSGB数(shù)据格式设置和输(shū)出(chū))
4- EPS一套
(1) 倾(qīng)斜(xié)摄影三维(wéi)模(mó)型导入EPS测图方法
(2) EPS 采集(jí)地(dì)物要素的方法
(3) EPS 采集等高线的方法
5- 航(háng)测生(shēng)产技术培训
以实际项目为(wéi)例,从航飞路线设计、外业相控选(xuǎn)点、CORS站或千寻网测(cè)量方法、飞行注意事项、内(nèi)业数(shù)据处理(lǐ)、EPS数据(jù)采集等方面综合培训。
方案简(jiǎn)介
1. 基(jī)于大疆(jiāng)M600倾斜摄影的1:500高精度不(bú)动产测(cè)量整(zhěng)体解决方案
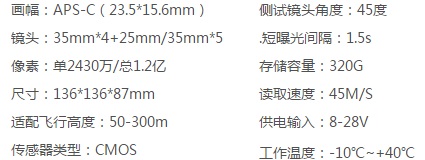
1.倾斜摄(shè)影(yǐng)所用无人机参数(shù)和所用(yòng)软件
以西安市长安县常行村(cūn)为(wéi)例,倾斜摄影地籍测(cè)量(liàng)所用大疆M600无(wú)人机,镜头采用采用智绘鹰五镜头倾斜摄影相(xiàng)机,如下图所示,三维建模采用Smart 3D软件,数据采集和(hé)检测采(cǎi)用清华山维EPS软件。
格")
大疆M600无人(rén)机

五(wǔ)镜头倾(qīng)斜相机
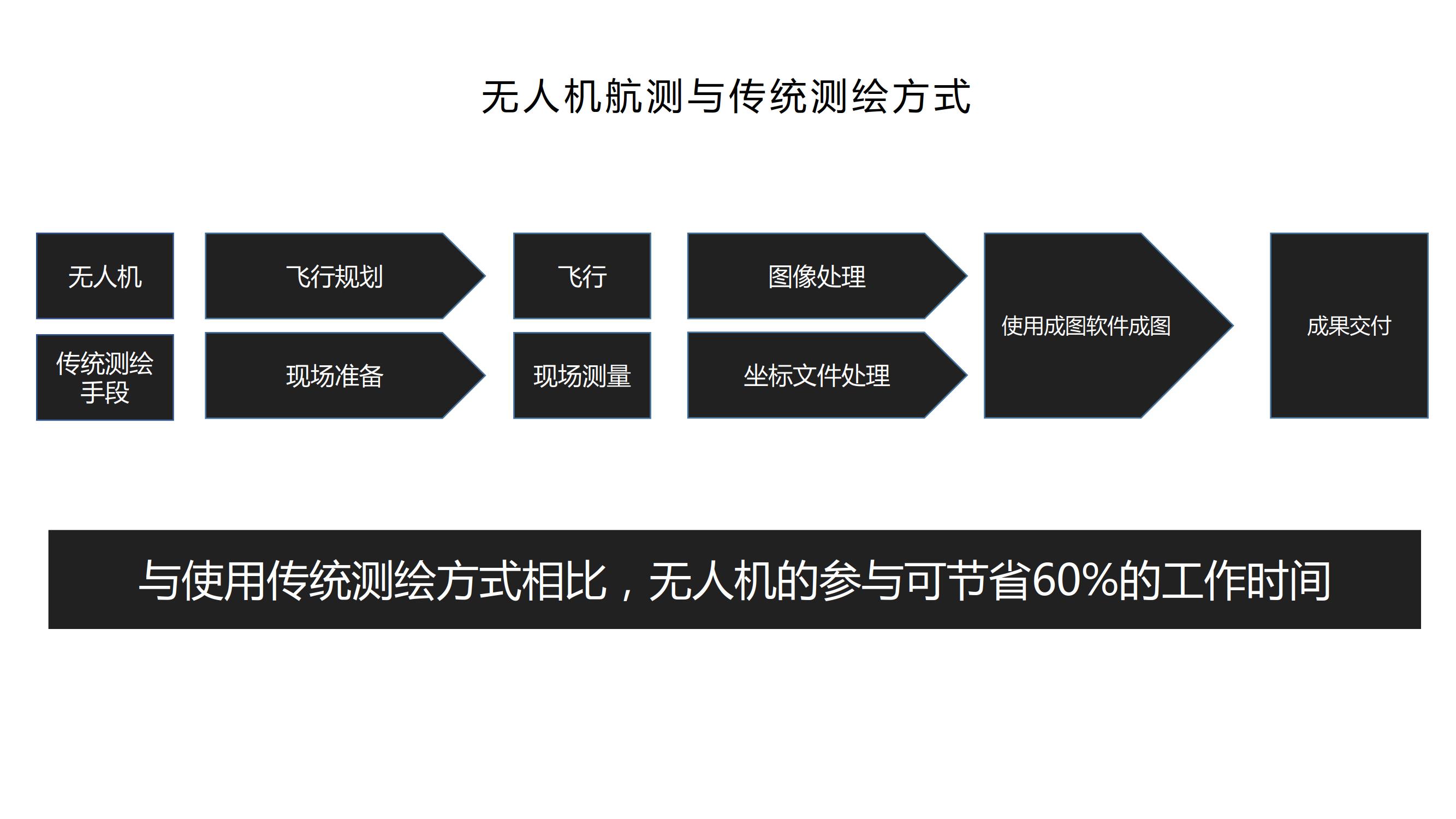
2 项目实施技(jì)术方案
项(xiàng)目实施其(qí)步骤分(fèn)为数据采集、数据(jù)预(yù)处理(lǐ)、数据生产等三个阶段,采用多旋(xuán)翼(yì)无人机进(jìn)行(háng)低(dī)空(kōng)数据采集,通过加载机载差分GPS获取高精度照片坐标(biāo),数(shù)据处理采(cǎi)用Smart3D软件进(jìn)行倾(qīng)斜摄影三维建(jiàn)模数据处理,生产实景三维模型及真(zhēn)正射(shè)影像,技(jì)术方案如图所示。
2.1数据预处理
依据项目设(shè)计要求,进行倾斜影像检查、飞(fēi)行质(zhì)量检查、控制(zhì)点检查、机(jī)载差分GPS数据(jù)解算(suàn)等预处理(lǐ)工(gōng)作, 数(shù)据无误后,导入(rù)Smart3D软(ruǎn)件进行空三加密解算。
2.2数据生产
2.2.1实景三维模型生产
在smart3D中解算好空(kōng)三(sān)成果之后,经过提交工程(chéng)、设(shè)定(dìng)格网(wǎng)大小(xiǎo)、输出格式设置等(děng)流程,生(shēng)产出测(cè)区的(de)实景三维模型成果(OSGB格式),根(gēn)据实景三维模型,提交工(gōng)程,选择(zé)制作DSM,生产出的(de)正射影像图

Smart3D生成(chéng)实(shí)景三维模型
2.3大比例尺(chǐ)测图
完成测区空(kōng)三成果、实景三维模型、正(zhèng)射影像等(děng)数据的制作,采用(yòng)EPS测图(tú)软件打开实景三(sān)维模型(xíng),由作(zuò)业员在EPS软(ruǎn)件中进行点、线(xiàn)、面测图,并按(àn)照(zhào)国标要求赋(fù)予图(tú)层与属性信(xìn)息。.后采(cǎi)用CASS软(ruǎn)件进行图形(xíng)数据编辑,生产大比例(lì)尺地形图数据(jù)。
2.4成果精度(dù)检测
2 . 4 . 1 控制(zhì)点(diǎn)与(yǔ)检(jiǎn)核点选取(qǔ)
控制点资料为(wéi)外(wài)业人员(yuán)在测区范围内获取9个控制点坐标信息,控制(zhì)点的(de)选(xuǎn)取原则按照九宫格的原则,坐标(biāo)系为国家2000坐标系。选取其中5个点作为(wéi)控(kòng)制点(diǎn)参与(yǔ)实景三维空(kōng)三加密控制,其余4个点位进行模型成果精度检(jiǎn)测,并在(zài)村子里测量一些建筑物长度进行模型成果精(jīng)度检(jiǎn)测(cè)。如下图(tú)所示;
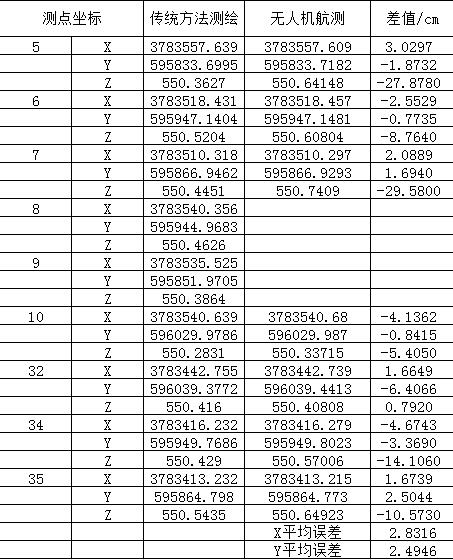
**坐(zuò)标和(hé)实测坐标对(duì)比
边长测(cè)距 | 传统方法测绘 | 无人机航测(cè) | 差值/CM |
1 | 17.811 | 17.805 | 0.6 |
2 | 6.754 | 6.716 | 3.8 |
3 | 6.538 | 6.582 | -4.4 |
4 | 6.881 | 6.905 | -2.5 |
模型平面边长精度(dù)检查
采用无人机倾斜摄影建模(mó)方法进行1:500不(bú)动产测量(liàng)大比例(lì)尺测图技术路线具有(yǒu)可行性,相对边(biān)长误(wù)差(chà)均(jun1)小于5厘米,精度满足地籍(jí)测量要求,通过加载机载差(chà)分GPS,大大减少了地(dì)面像控点的(de)布设(shè),采(cǎi)用(yòng)的裸眼立(lì)体测图技术以其(qí) 率,高精(jīng)度,简单易(yì)学(xué)的特点,广泛(fàn)应用于(yú)地籍测量,不动产测绘,城市大比例尺地形图更新等(děng)领域,是(shì)测绘领(lǐng)域的一项革命性的技(jì)术。